Excavation Autonomy
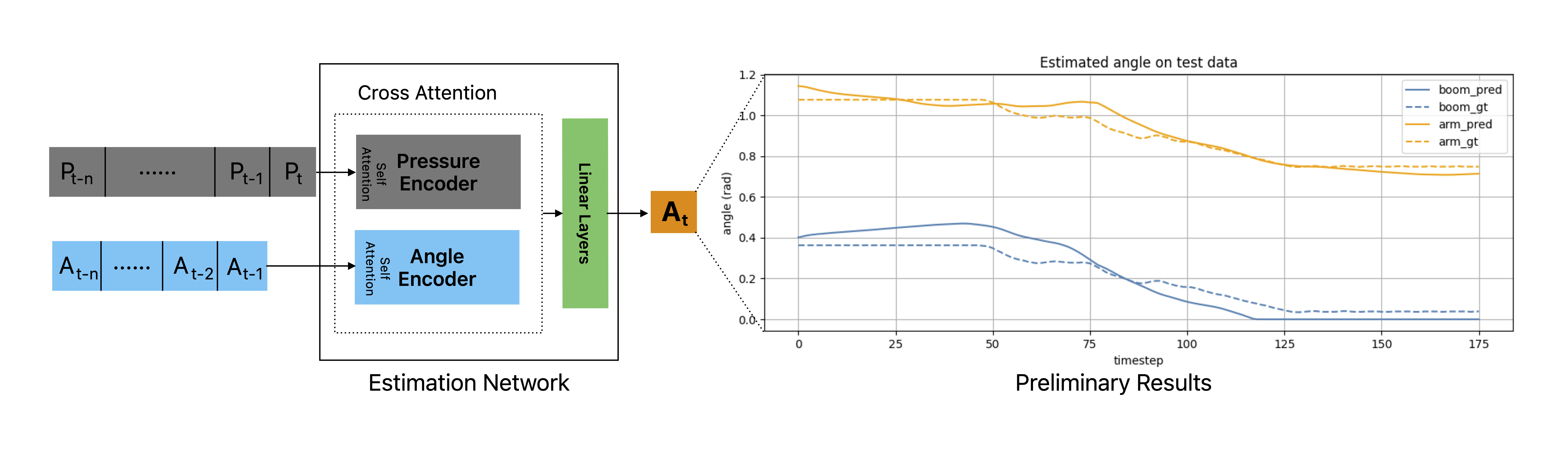
Real-world excavation is one of the current application areas driving the lab's work in task-aware perception, robust visual sensing, and safe autonomous operation under field conditions.
Karthik Dantu is an Associate Professor in Computer Science and Engineering at the University at Buffalo. He works on safe and efficient methods for perception, representation and planning for robot autonomy. His research is centered around two field deployments - culvert inspection and autonomous excavation. For his work, he has received the IEEE Region 1 Technological Innovation award (2022), NSF Early Career Award (2019), several nominations to best paper awards and the UB CSE senior researcher of the year in 2021. He is a senior member of the IEEE, member of ACM and AAAS. At UB, he is the Founding Director of the Center for Embodied Autonomy and Robotics, Co-Director of the MS program in Robotics and leads the Distributed RObotics and Networked Embedded Systems (DRONES Lab).
Real-world excavation is one of the current application areas driving the lab's work in task-aware perception, robust visual sensing, and safe autonomous operation under field conditions.

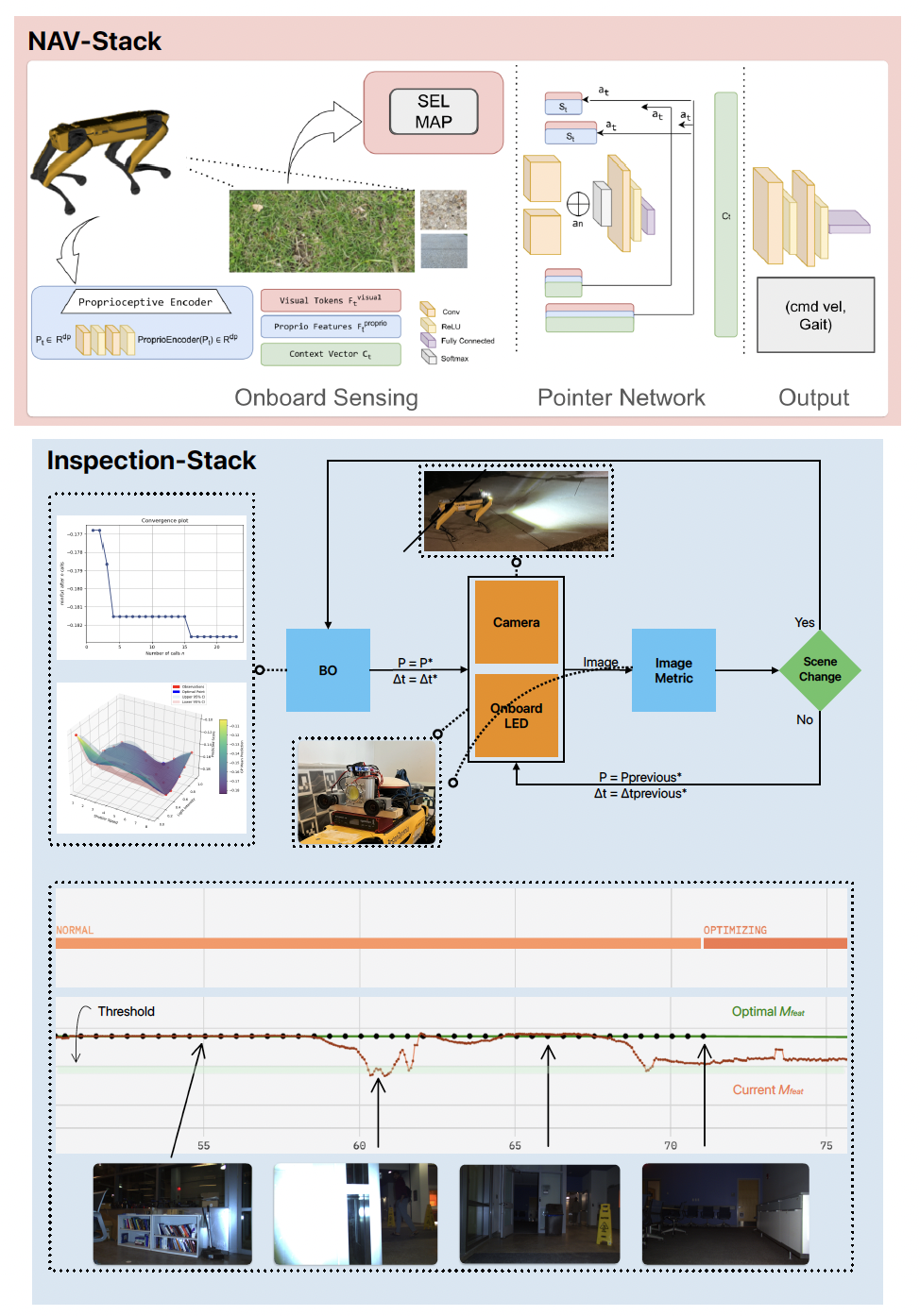
Culvert inspection is the second major application theme currently highlighted in the lab: a good example of autonomy and perception designed for infrastructure settings rather than clean indoor demos.